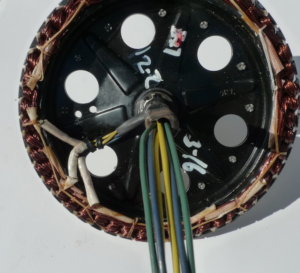
Uno de los problemas más comunes en los motores hub són los cables rotos o pelados en el punto en el que éstos “salen” del eje del motor. SI los cables están retorcidos o tensos los bordes del eje del motor podrían cortar los cables. La mayoría de los motores hubs usan sensores hall para decirles al controlador la posición del motor. Los sensores halls se quemarían fácilmente si los cables del tierra o la alimentación se cortarán. El motor de abajo dejó de funcionar después de que los cables fuesen dañados , como consecuencia los sensores también se quemaron.

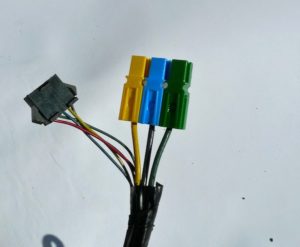
Cinco de los cables conectan con los sensores y otros tres conectan a las fases del devanado.
Si los sensores siguiesen funcionando después de que los cables fuesen dañados se pueden reparar simplemente los cables y seguir usando los sensores hall del motor. Si, en cambio, el sensor fuese dañado sustituirlo es un proceso muy costoso en tiempo por lo que no es recomendables. Una alternativa una vez que los sensores están quemados es remplazarlos con un controlador sensorless, lo que permitiría al motor ser usado.
Ya estés reparando los cables o mejorando el motor para usar un controlador sensorless el motor tendrá que estar abierto y los cables que pasan a través del eje reemplazados.
Hay que llevar cuidado al desmontar un motor hub, cuando lo vuelvas a montar ten en cuenta que las dos mitades del motor se atraen y si las acercas se juntarán debido a la atracción magnética así que lleva cuidado con tus dedos.
La mayoría de motores reducirán su vida cuando la alimentación del motor incremente significativamente, es el precio a pagar por un mayor rendimiento.

40 amp Sensorless controller
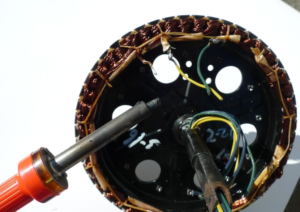
Una vez el motor esta desmontado corta los cables dejando al menos unos centímetros conectados a las fases del devanado.

Corta los cables del sensor hall. Si piensas usar el motor como antes los cables tendrán que se reemplazados con otros cables de un calibre similar. Si piensas hacerlo funcionar con un controlador sensorless ya no necesitarás estos cables.

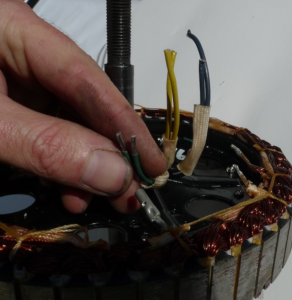
El espacio hueco dentro del eje es muy estrecho. Si no vas a usar sensores puedes usar cables de fase más gruesos que permitan usar un controlador de más potencia.
Pasa los nuevos cables a través del tubo del eje. Ten cuidado de no cortar el aislamiento de los cables con los extremos afilados del eje.

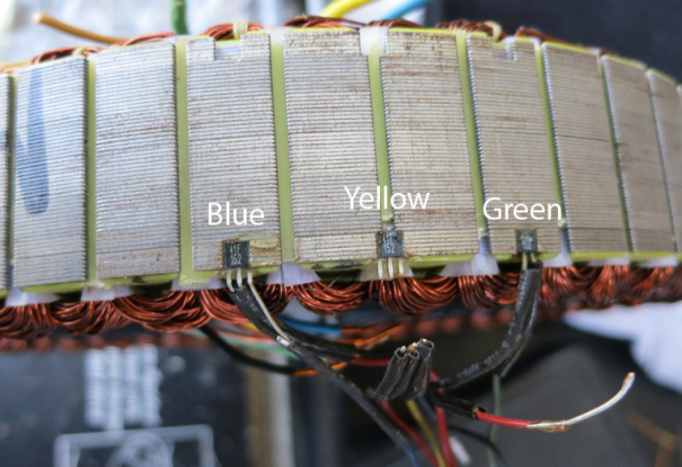
Quita los cables de fase viejos usando un soldados de estaño. Fíjate en el color de cada cable para saber dónde deberás soldar después.
Suelda los nuevos cables de fase a las fases del devanado. Mantén los colores, te servirá de ayuda para reconectarlos después. Una alternativa a usar cables más gruesos es usar dos cables más finos. Reutiliza el aislamiento de fibra que el fabricante usó para cubrir las soldaduras.
Una vez las tres fases estén completas sujeta los cables a la parte baja del estator.
Coloca el estator en el rotor. Como he dicho ten cuidado al acercarlos.