
Imanes y electroicamnes permanentes
Un imán permanente (IP) es bastante fácil de entender. Es una pieza de metal que aunque está magnetizada todo el tiempo solo reacciona ante metales ferrosos, es decir, metales con hierro, un ejemplo de ellos es el acero. Los motores que usamos suelen ser tan solo de tres tipos; férricos, samario-cobalto y neodimio.
Hace unos años algunos de los motores más pequeños y baratos usaban los imanes férricos, bastante endebles, que suelen ser de un color gris oscuro. Por su precio este tipo de imanes pueden encontrarse aún en algunos e-vehiculos para niños.
Los imanes de samario-cobalto se desarrollaron en los 70’s con una ventaja respecto a los demás; ser muy tolerantes al calor. Son capaces de retener el total de su fuerza magnética (que mesuramos en gauss) cuando son expuestos a temperaturas cercanas a su temperatura de Curie (la temperatura en la cuál un material pierde sus propiedades magnéticas) A pesar de las evidentes ventajas de este tipo de motor el cobalto del que esta formado es un material caro así que las ansias por encontrar un imán que fuese más barato llevo al desarrollo del neodimio en 1982.
Los imanes de neodimio empezaron a usarse de forma masiva en los 2000., antes de ellos eran también muy caros pero gracias a la informática y su necesidad de un imán más fuerte el material bajo de precio debido a la producción masiva para satisfacer las necesidades de la industria.
Para entender las características de temperaturas de los imanes de neodimio se debe explicar como se fabrican los imanes permanente. Cuando el material base es fabricado se le expone a una temperatura por encima de su temperatura de Curie. A está temperatura los átomos están en un estado de energía que les permite girar y moverse libremente sin verse afectado por la orientación magnética del resto de átomos de su alrededor.
Después, el material calentado es expuesto a un campo magnético muy fuerte producido por un electroimán posicionado cerca de él. Entonces, cuando el campo electromagnético está aún “energizado” el material se enfría. Como resultado, todos los átomos (que en el fondo son todos pequeños imanes) tienen su campo magnético orientado hacia la misma dirección, como resultado todos están quietos en su sitio mientras la dirección de su campo magnético no cambie.
La temperatura de Curie del Neodimio de alta calidad (al que se le añade terbium y dysprosium) es de 320 Cº. No obstante, los imanes de neodimio más normales están hechos de materiales más baratos por lo que puede empezar a perder magnetismo a partir de los 80º.
Si alguna vez ves que tu hoverboard empieza a ir más rápido sin explicación ninguna comienza a preocuparte, posiblemente hayas sobre calentado los imanes…y no hay ninguna manera de arreglarlo.
La experiencia nos dice que si un motor esta totalmente frío al usarlo probablemente será más grande, pesado y caro de lo que necesitamos, y en cambio si no puedes ni sujetar el motor en tu mano por el calor que desprende probablemente estarás convirtiendo demasiados vatios de la batería en calor perdido.
Esta explicación nos lleva a los electroimanes
Un experimento básico en electricidad es envolver un cable de bronce alrededor de un clavo hecho de acero (recordemos, formado en 99% por hierro). Al aplicarle corriente continua (DC) a través del cable el clavo se volverá temporalmente un imán, hasta que desconectes la corriente y el clavo pare de comportarse como un imán. También, en el mismo experimento, se puede cambiar el polo norte y sud que tienen todos los imanes cambiando el positivo y el negativo de la batería que se usa para hacer del clavo un imán.
El experimento es muy útil para entender como funcionan los motores modernos. Una de las leyes magnéticas más básicas y que se aplican a los motores es esta: los polos opuestos se atraen unos a otros y los polos iguales se repelen.
Si un IP tiene su polo norte mirando hacia fuera, y esta situado de cara a dos electroimanes que esta a cada uno de sus lados verás, si el electroimán de la izquierda se le da energía de manera que su polo norte este mirando al IP, y el electroimán de la derecha se le da energía haciendo que el polo sur este mirando también al IP, el de la izquierda empujar al PM hacia la derecha al mismo tiempo que el electroimán está empujándolo hacia la derecha.
Direct Drive, Geared, or Mid Drive
Direct Drive hub motors (DD) are as simple as a motor can be. Son suficientemente grandes para ser ruidosos, algo pesados y cuando estan apagados mantienen algo del campo magnético.
A pesar de ello aún son usados y probablemente seguirán usándose por diversas razones, su precio, una consecuencia de su simplicidad. Además, sobre los 30-MPH pueden manear más amperios y más calor que los motores hub orientados. (¿?) También, al ser combinados con un controlador de onda sinusoidal se consigue que sean silenciosos.

Direct-Drive hubs (DD), El eje y el estator están fijos, y la parte hilada está a la derecha.
Geared hub motors tienen un set de orientación que permiten al motor girar cinco veces por cada vez que la rueda da una vuelta. Esto permite a un motor relativamente pequeño y liviano tener un torque comparable a un motor más grande como los Direct Drive hubmotors. Una de las razones por la que son tan populares es porque incorporan una rueda interna, lo que es perfecto para vehículos como las bicicletas eléctricas pues si pedaleas sin tener el motor encendido la rueda girara sin oponer resistencia.
Por estas razones son los motores más populares para situaciones que requieran una potencia entre 250W y 1200W.

Los geared hub motors son los más populares.
La complexidad y coste extra de los motores mid-drive comportan unos beneficios muy específicos. Por una parte la Unión Europea tiene una restricción de 250W de potencia para algunos vehículos lo que puede ser una desventaja en ciudades con cuestas pronunciadas.

Un mid drive tiene una gran ventaja a la hora de subir pendientes.
Brushed and BrushLESS (con escobillas o sin escobillas)
En la industria se suelen usar motores de inducción en lugar de motores de imanes permanentes. En un motor de inducción, el estátor y el rotor están hechos los dos de grupos de electroimanes. Gracias a esto, la potencia de los dos puede ser variado como deseemos.
Como el rotor también gira se tiene que añadir un método para excitar y desexcitar las bobinas del rotor mientras está funcionando. En un motor brushed (con escobillas) con un tipo de contactos (brush, escobillas) que friega contra una de las partes que giran.
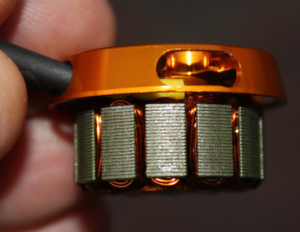
Las escobillas, situadas en la carcasa del motor (de manera que se pueden ver incluso mientras el motor esta funcionando) Como las escobillas se van haciendo cada vez más cortas con el uso suelen estar diseñadas de manera que sean fácil de limpiar y reemplazar si se requiriese. La parte de los contactos de escobillas que están diseñadas para durar más tiempo está sujeta al eje del rotor y es la parte con la que las escobillas friegan y se llama conmutador.
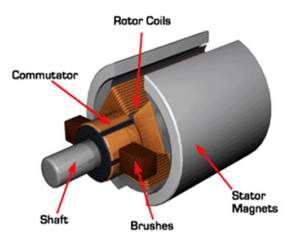
Este es la imagen de un pequeño motor brushed. Tiene dos curvas magnéticas en estados (enganchadas a su protección exterior) Como el rotor en el centro tiene solo tres bobinas el conmutador del final del eje tiene 6 contactos, contra los que las dos escobillas rozan. Una de las escobillas está conectado al positivo del controlador y la otra al negativo.
Se suele decir que los motores con escobillas son problemáticos, en ocasiones tienen que reemplazarse las escobillas y son menos eficientes pero al estar diseñadas para un rango de voltaje específico y usar controladores mucho más baratos que los motores sin escobillas por lo que algunos fabricantes prefieren seguir usándolos.
La gran pregunta es ¿como hacen los motores de imanes permanentes del tipo brushless para saber cuando encender y apagar los electroimanes que tienen en el estator justo en el momento correcto? El controlador siente la fuerza contra-electromotriz en el motor cuando uno de los imanes pasa por el sensor hall. Como los motores son de tres fases, hay tres sensores hall en los motores más comunes de este tipo.
Cada uno de los tres sensores hall tiene tres patas y un motor de tres fases tiene cinco cables hall. Esto es porque uno de los cables es el positivo y otro la tierra/negativo para los tres sensores. Los tres cables restantes son para la señal de “on” y “off”. Esta señal es de tan solo 5 V, por lo que cada sensor es alimentado con 5V y cuando un imán se aproxima al sensor los 5V pasan a través del sensor hall hasta el controlador.
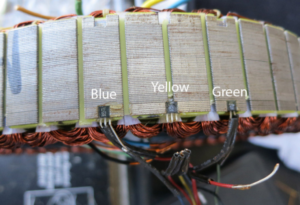
En la foto hay tres sensores hall colocados de la manera más habitual. La pata izquierda es el positivo, la del medio el negativo y la de la derecha es la señal.
A la hora de reparar un cable hall estropeado, los cinco pequeños cable del sensor deben ser de Teflon para soportar temperaturas alta, a pesar de ello pueden ser tan pequeños como 30-AWG. La mayoría de controladores solo tienen operaciones con sensores o sensorless pero hay algunos que tienen las dos, la opción para encenderse funcionando con los sensores, que proporciona un buen control a bajas velocidades y después al cambiar al modo sensorless. Tener una opción para trabajar sensorless nos ayuda en el caso de que alguno de los sensores hall se sobre caliente para poder parar de un modo seguro.
El motor Tifalforce usaba sensores ópticos para informar al controlador de la posición del rotor. Estos sensores puede trabajar a RPM’s muy altos. Además, a diferencia de los sensores hall que pueden estropearse por el calor al tener que ser colocados cerca los imanes del rotor que , a su vez, están cerca a los polos del estator que es la pieza que más se calienta del motor. Los sensores ópticos en cambio pueden colocarse en partes más alejadas del calor..
A la hora de comprar siempre es recomendable hacerse con un motor con sensores hall. Un motor con sensores hall puede seguir funcionando sin un controlador de sensores.
Porqué 3 fases?
En un motor de imanes permanentes de corriente continua los imanes se montan uno al lado del otro alternante los polos apuntando hacia los polos del estator. Por ello, siempre tendrán un número par de imanes.
Los electroimanes son organizados en grupos de tres, llamado “3-fase” SI nos imaginamos a los polos del estator como los doce número de un reloj, 1,4,7 y 10 serían todos partes de la misma fase por lo que serán activados y desactivados al mismo tiempo. Siguiendo el patrón el 2,5,8 y 11 serán el segundo grupo y 3,6,9 y 12 serán el último grupo.
También existen motores de una fase, que pueden ser interesantes para aprender sobre este tipos de motores por su simplicidad, pero por sus características no funcionara igual de suave que uno de 3-fases. También existen motores de 5 o incluso 7 fases que serían más eficientes que los de 3. A pesar de ello también son mas complejos y caros. Por ello los de tres fases son los más famosos al ser bastante eficiente y más baratos complejos que los de cinco fases o más fases.
Inrunner or Outrunner
En un motor inrunner la cubierta externa es estacionaria y el rotor tiene los imanes permanentes pegados a él en el centro del motor. En uno inrrunner el estators con sus hilos de cobre están en el centro y están hilados a una de las placas del final.
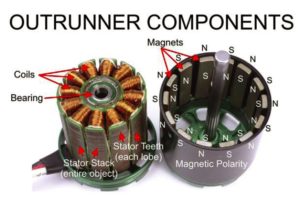
Aquí están la mayoría de componentes de un RC outrruners. La parte de la derecha contiene todas las partes giratorias.
SI los dos motores tienen el mismo diámetro, el outrunner tendrá el entre-hierro más alejado del eje lo que incrementará el apalancamiento, proporcionando más torque por vatio.
Esto mejora el torque por vatio aplicado al motor debido al espacio extra, pero como contra eso hace que el calor que desprenden las bobinas irán hacia el centro en un lugar de hacia fuera del motor.

En inrunner, el menor tamaño de rotor tendrá que hacer mas RPMs para proveer de la misma energía. Esto significado de que un inrunner dpendera en ocasiones de mecanismos externos, como cintas y cadenas, para bajar la velocidad de salida hasta los RPMs de la rueda. Por ejemplo, en una rueda de 26 pulgadas a 26-MPH gira a 333 RPM, mientras que un motor eléctrico suele moverse eficientemente cerca de 3000 RPM.
Uno de los beneficios de un inrunner es que, ya que las bobinas están unidas a la carcasa exterior normalmente desprenderán todo el calor hacia fuera.
Kv and “Turn Count”
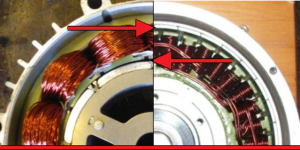
Hay un espacio vació alrededor de cada “iente”de metal del estator. Este espacio se puede llenar con muchas hiladas de cable fino, o con menos hiladas de cable más gorda. Un motor con menos vueltas de hillo girara más rápido por cada voltio que lo apliques, uno con muchas vueltas girara lentamente.
A esto se le llama KV, de “Konstant velocity” a raíz de los investigadores alemanes que lo descubrieron.. Por epemlo, si la Kv de un motor es de 9.3 RPMS por voltio si se le aplicand0 10 voltios el motor girara a 93 RPM y con 100 voltios a 930 rpms. El Kv de un motor se puede cambiar quitando los hilos y volviendo a hilarlos con un hilo de diferente diámetro.

La imagen de arriba muestra dos estators, el de la izquierda tendrá menos KV y el de la derecha más.
High Pole count, low pole count

La tarjeta verde es lo que sujeta los tres sensores hall, en el motor de la derecha la tarjeta esta en el lado contrario.
En la foto de arriba se puede ver fácilmente las diferencias visuales entre un motor high pole-count y un low pole-count. El beneficio de utilizar un high pole-count es que si quieresla opción de usarlo como un controlador sensorless, tener muchos polos pequeños ayudara a impedir una caída en caso de que el motor pare de manera inesperada.
De todas maneras, si quieres probar un voltaje más alto (que hará al motor ir más rápido) quizá encuentras al high-pole-count motor limitado a la hora de usar los controladores comunes.
Y después está el problema de las pérdidas de corriente de eddy. La corriente de Eddy es díficil de explicar fácilmente, lo único que debes saber es que para RPMs muy altos necesitas laminaciones finas y un lower pole-count, o cuando llegues a cierto RPM diferente para el que motor ha sido diseñado éste se sobre-calentara.
Este es el estátor de un pequeño motor de alto RPM RC outrunner. Puedes ver como el estator está hecho de un conjunto de 22 laminaciones muy finas de 0,35mm.
El centro del estátor tiene que ser hecho de algún tipo de acero pero no de un bloque sólido. El estator esta formado por muchas laminaciones finas que están un al lado de la otra. Las laminaciones de 0,50 mm son las más comunes y por ello las más baratas debido al alto volumen de producción. Las aún más finas, de 0,35mm vienen después de las de 0,50 mm. Por ejemplo, el motor de Joby era capa de dar 10000 RPM’s, y usaba unas láminas de 0.20 mm.
En motores que alcanzan altas RPM las láminas también tiene una parte de silicona en su acero para evitar que se calienten.
Axial o radial
Los motores axiales son raros, la mayoría de ellos que encontrarás tendrán un flujo radial. La razón de esto seguramente sea que en un motor de este tipo puede hacerlos de diferentes potencia simplemente haciendo las laminas del estátor más grandes o pequeñas..
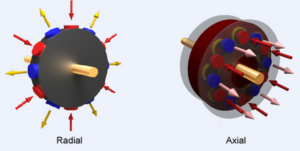
Los motores de flujo radial son los más comunes y los axiales los más raros pero ambos pueden ser buenos para el caso específico para el que fueron diseñados.