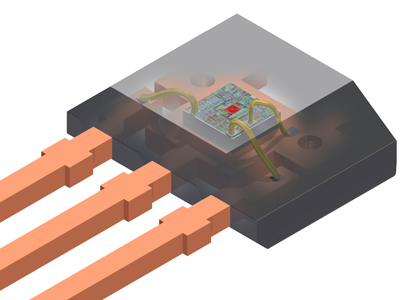
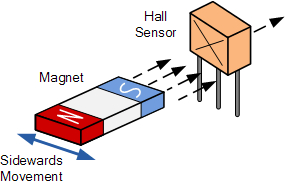
El principio básico y por lo que se distinguen de otros es que este tipo de sensores responde al campo magnético. Funciona de la siguiente manera; cuando el sensor detecta un campo magnético los electrones se moverán a uno de los lados , de manera que tendrá un negativo, y un positivo y como consecuencia dará un voltaje al que se conoce como voltaje hall.
A día de hoy esta clase de sensores se usan en aplicaciones que necesitan de detectores de velocidad o de distancia.
Algunas de las ventajas que nos proporciona usar un sensor hall respecto a otros sensores son; rara vez el sensor se verá dañado por condiciona climáticas como el viento, aire o una acumulación de arena al estar integrado en el interior del motor, al no ser un contacto tampoco le afectará el fregamiento, opera a frecuencias de hasta 100kHz, es capaz de medir la velocidad “0” y grandes corrientes. Por supuesto no todo son ventajas, le pueden afectar campos magnéticos externos al nuestro, genera mucha calor, el voltaje de offset es alto y la señal puede ser bloqueada por un metal ferroso.
Existen diferentes tipos de estos sensores, entre ellos:
- El sensor hall unipolar de contacto (referencia A417) que se enciende al detectar el campo magnético y se paga cuando deja de detectarlo.
- El sensor hall bipolar de enclavamiento (referencia A229) que se enciende con uno de los polos y guarda el estado hasta que detecta el polo opuesto.
- El sensor hall de distancia (referencia A324) que detecta el campo magnético de manera gradual. Si no detecta ninguno da la mitad de su vmax 2,5 V y dependiendo del lado del imán que estés usando el voltaje de salida incrementa hasta 5 V o baja hasta los 0 V.
Funcionamiento sensor hall.